Editing of the NPCCars / Devlog about CryptoCompany CEO | Sort of Devlog #8

The last two days I showed you how I work on the streets on the islands and the race track as well. All went good so far. Today I have to work on the NPC car behavior.
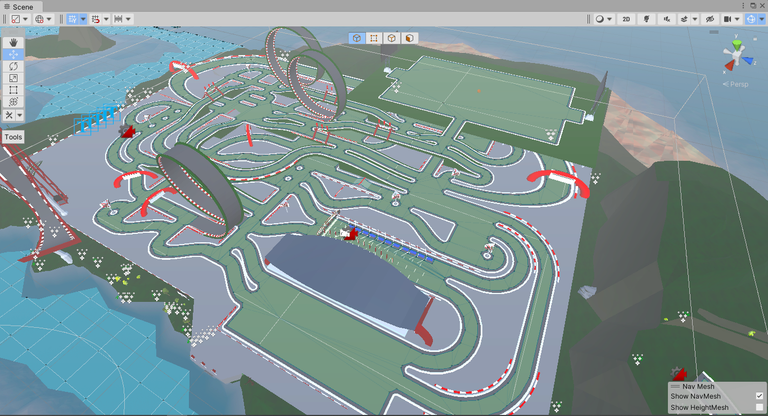
The NavMesh looks right now and the NPC cars are driving around now. Today I have to fine tune their behavior.
As example: Actually sometimes an agent misses his aimed next waypoint and begins circling around this point, because he tries to hit the point. Or when I use many agents they can build a huge crash at intersections. I already fixed this behavior with making every car a NavMesh obstacle, but I still have to test this with a few more test runs.

For the circle situation I tried a few ways how I can edit this behavior by maxing the steering angle, but I have an better idea, I think - I will increase the size of the sphere collider which needs to be hit. Or I could place this trigger spheres on different prepared places.
So all in all it's playing around with some settings to get the best behavior.
And without more bla bla bla, let's focus on my main tasks...
See you later!
Greetings from Paraguay!
Follow  for the hottest & a little less buggy stuff!
for the hottest & a little less buggy stuff!
No... Better follow @CryptoCompany & @brobang, my game & blockchain project! You don't will regret it!
Your vote keeps development, stupidities & fridges rollin'!
Rock 'n' Roll & Hive a great day!
Postings from me or CryptoCompany within the last 7 days:
• Editing of the Race Track / Devlog about CryptoCompany CEO | Sort of Devlog #7• Editing of Roads, Driveways & Pedestrian Areas / Devlog about CryptoCompany CEO | Sort of Devlog #6
• Changings to the CryptoCompany Voting Service
• Bro Bang Event 5 is over, 6 has started + EVENT & SEASON RANKINGS